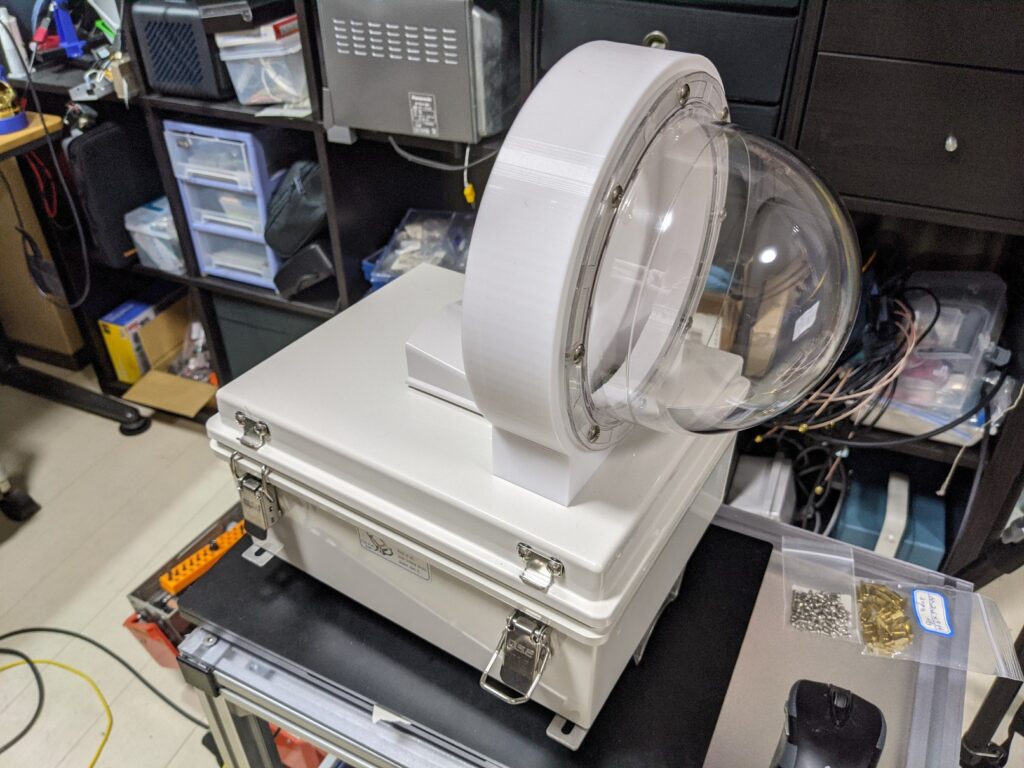
このような受信局を立ててデータのフィードを行うと、紐づけたアカウントがビジネスプランになり、ほぼフル機能が使い放題となります。ホストPCはWindowsPCでも良いのですが、部屋まで延々50オームのケーブルを引っ張ると減衰も大きく電力効率的にも良くないので、屋根に上げたボックスにラズパイとRFインターフェースを入れてしまうと利点大です。RFインターフェースは有名安価なRTL2832U系を始め、何でも使えるのですが、私はフィルタ付きのFlightAware Pro Stickを使っています、値段も20ドルしなかったのですが…現在は入手困難ですね。
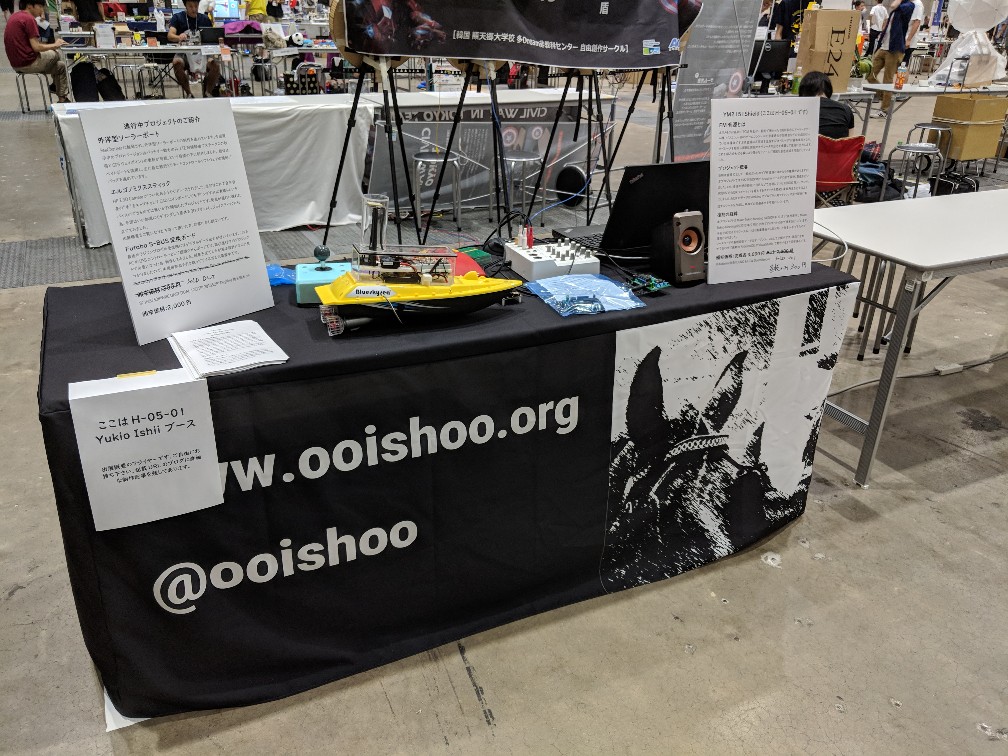
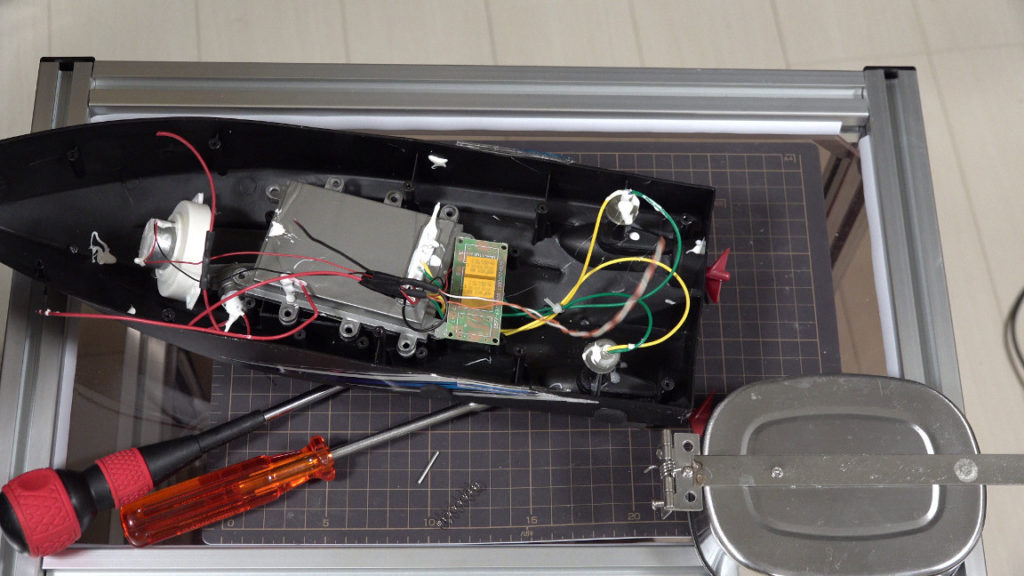
船体の制作は苦労されたようですが、何より一般的に手に入る部品のみでカリフォルニアからハワイまで走り切ってしまうというのがシビれますね。ここまでなら「すごい!!」だけなのですが、記事中にイリジウムのモデムを使ってリモートコントロールを行っていたという記述が、検索すると3万円弱程度の頑張れば購入できる価格のようです。是非遊んでみたいのですがもちろん日本国内で使用すると電波法の壁で違法ですので公海上に自力で運ぶしかありません…なら同じようなタイプのソーラーボートを作るか!となってダラダラ進めている途中経過をMaker Faire Tokyo 2018で展示しますので詳細をここにメモしておきます。